
Use of brush less DC motors (BLDCs) is on the rise. But their control usually requires rotor-position information for selecting the appropriate commutation angle. Normally, a Hall Effect sensor is used to sense rotor position. But in cost-sensitive applications, a sensor-less commutation scheme is often desirable. The circuit described here uses a DRV10866 driver IC to drive a small BLDC fan, without using any position sensors. A BLDC fan’s speed can be varied smoothly, without the usual steps associated with a normal AC fan.
Circuit and working
Fig. 1 shows the circuit of a sensor-less BLDC motor driver. The circuit is built around an NE555 (IC1), a DRV10866 (IC2) and a few other components.

Fig. 1: Circuit of brushless DC motor driver

Fig. 2: An actual-size, single-side PCB for the brushless DC motor driver

Fig. 3: Component layout for the PCB
DRV10866 driver IC from Texas Instruments is used to drive a small three-phase BLDC motor (M1). The circuit is of a three-phase, sensor-less motor driver with integrated power MOSFETs having drive-current capability up to 680mA peak. DRV10866 is specifically designed for low noise and low component-count fan-motor drive applications. A 150° sensor-less back emf scheme is used to control the three-phase motor.
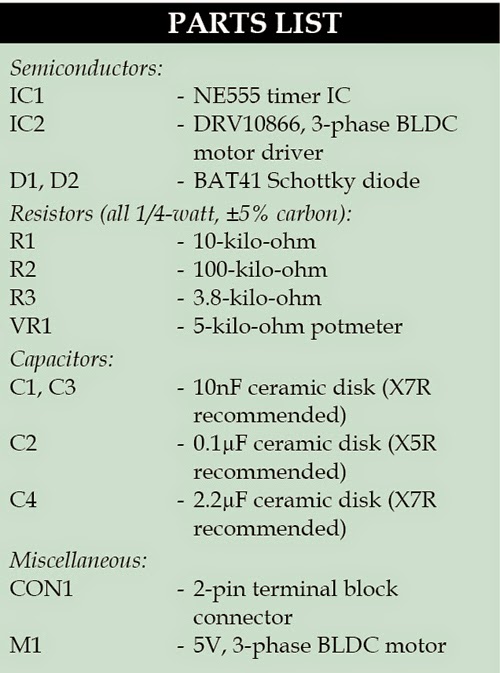
A 100k pull-up resistor (R2) is used at pin 1 of IC2. Pins 2, 4, 7 and 6 of IC2 are connected to common, phase A, phase B and phase C of the BLDC motor, respectively. Pin 10 of IC2 is connected to pin 7 of IC1 to get the pulse-width modulated (PWM) signal from IC1 to control the speed of the BLDC motor.
The output signal (PWM) is available at IC1’s pin 7 (DIS) and not from the usual output pin 3 of the IC. The 25kHz (approx.) PWM signal’s duty cycle can be adjusted from 5% to 95% using potentiometer VR1. The speed of the BLDC motor can be controlled by varying the duty cycle of the PWM signal. Turning VR1 counter-clockwise lowers the duty cycle which, in turn, lowers the speed of the motor, and vice versa.
Construction and testing
An actual-size, single-side PCB for the brushless DC motor driver is shown in Fig. 2 and its component layout in Fig. 3. Assemble the circuit on the recommended PCB to minimise assembly errors. IC2 should be fitted on solder side of the PCB.
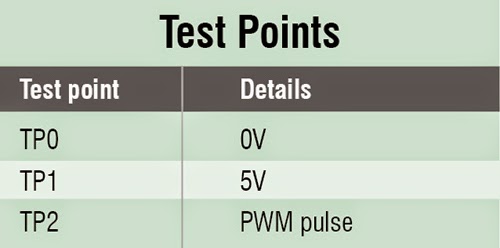
After assembling the components, connect a 5V DC supply to CON1 connector. To test the circuit for proper functioning, verify correct 5V supply for the circuit at TP1 with respect to TP0. Turn VR1 clockwise or counter-clockwise to increase or decrease the speed of the motor.
Author Name: Abhijeet Rai Sourced By: EFY











0 comments:
Post a Comment